I’ve long wanted to build my own point cloud viewer. While CloudCompare is my daily driver, I would also like something that I can extend and run algorithms in. I’ve previously taken a look at Unity, Godot, and Unreal Engine, but a full-blown game engine is more than I need, and they are quite complicated to program. Also, I have now switched to Rust for much of my point cloud-related software development. Bevy would be an obvious choice, and I want to take a closer look at it. But for now, I’ve decided to try something even more lightweight and low-level: macroquad. It is geared more towards 2D, but has a 3D camera, which is really all you need – all game engines need to project 3D objects onto a flat surface after all.
I quickly ran into issues though when trying to draw many points as spheres. This just didn’t perform at all. The solution was to go a level deeper and use miniquad for directly manipulating vertex buffers. There is very little documentation and just a few example projects for this, so I eventually turned to Claude Code to help me out with it. I ended up with a working viewer in less than 600 lines of code.
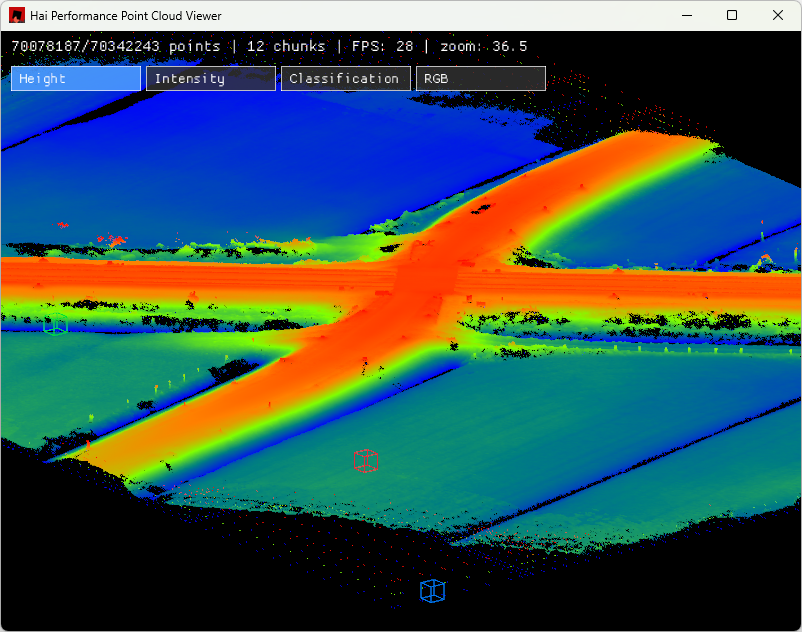
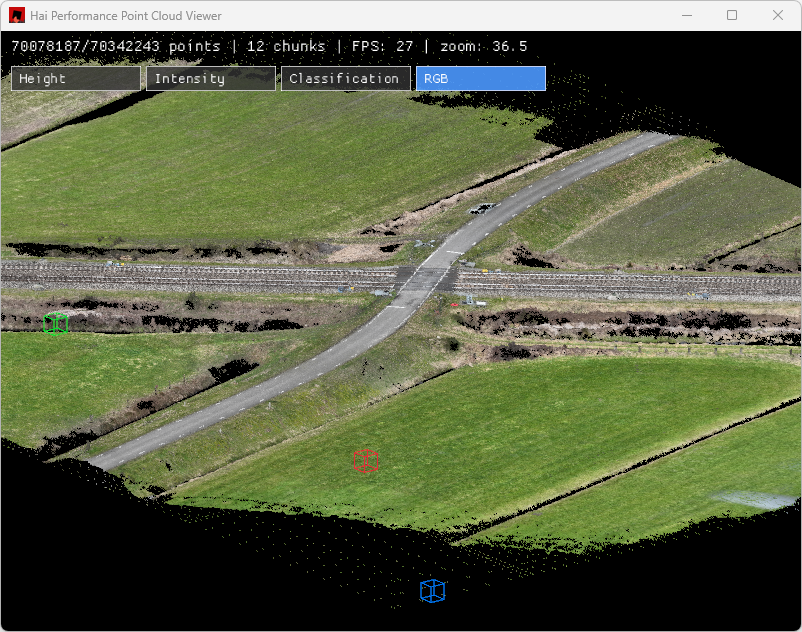
Here are two screenshots of a point cloud rendered by height and by color:
The code
Here’s the first part, the macroquad code:
use std::env;
use console::style;
use crate::glam::vec3;
use macroquad::prelude::*;
const MOVE_SPEED: f32 = 0.5;
const LOOK_SPEED: f32 = 0.5;
#[derive(Clone, Copy, PartialEq)]
pub enum ColorMode {
Height,
Intensity,
Classification,
Rgb,
}
impl ColorMode {
fn label(&self) -> &'static str {
match self {
ColorMode::Height => "Height",
ColorMode::Intensity => "Intensity",
ColorMode::Classification => "Classification",
ColorMode::Rgb => "RGB",
}
}
}
const COLOR_MODES: [ColorMode; 4] = [
ColorMode::Height,
ColorMode::Intensity,
ColorMode::Classification,
ColorMode::Rgb,
];
#[macroquad::main("Hai Performance Point Cloud Viewer")]
async fn main() {
if env::args().count() != 2 {
println!("{}", style("Usage: viewer pointcloud.laz").red());
return;
}
let args: Vec<String> = env::args().collect();
let cloudfile = &args[1];
let mut color_mode = ColorMode::Height;
let mut stage = {
let InternalGlContext {
quad_context: ctx, ..
} = unsafe { get_internal_gl() };
raw_miniquad::Stage::new(ctx, cloudfile, color_mode)
};
let world_up = vec3(0.0, 1.0, 0.0);
let mut yaw: f32 = 1.18;
let mut pitch: f32 = 0.0;
let mut front = vec3(
yaw.cos() * pitch.cos(),
pitch.sin(),
yaw.sin() * pitch.cos(),
)
.normalize();
let mut right = front.cross(world_up).normalize();
let mut up = right.cross(front).normalize();
let mut position = vec3(0.0, 1.0, 0.0);
let mut last_mouse_position: Vec2 = mouse_position().into();
let mut grabbed = false;
set_cursor_grab(grabbed);
show_mouse(!grabbed);
// Orthographic zoom: visible half-height in world units
let mut ortho_scale: f32 = 50.0;
loop {
let delta = get_frame_time();
if is_key_pressed(KeyCode::Escape) {
break;
}
if is_key_pressed(KeyCode::Tab) {
grabbed = !grabbed;
set_cursor_grab(grabbed);
show_mouse(!grabbed);
}
if is_key_down(KeyCode::Up) || is_key_down(KeyCode::W) {
position += up * MOVE_SPEED;
}
if is_key_down(KeyCode::Down) || is_key_down(KeyCode::S) {
position -= up * MOVE_SPEED;
}
if is_key_down(KeyCode::Left) || is_key_down(KeyCode::A) {
position -= right * MOVE_SPEED;
}
if is_key_down(KeyCode::Right) || is_key_down(KeyCode::D) {
position += right * MOVE_SPEED;
}
let (_mouse_wheel_x, mouse_wheel_y) = mouse_wheel();
if mouse_wheel_y.abs() > 0.001 {
let zoom_factor = if mouse_wheel_y > 0.0 { 0.9 } else { 1.1 };
ortho_scale *= zoom_factor;
ortho_scale = ortho_scale.clamp(0.5, 10000.0);
}
let mouse_position: Vec2 = mouse_position().into();
let mouse_delta = mouse_position - last_mouse_position;
last_mouse_position = mouse_position;
if grabbed || is_mouse_button_down(MouseButton::Right) {
yaw += mouse_delta.x * delta * LOOK_SPEED;
pitch += mouse_delta.y * delta * -LOOK_SPEED;
pitch = pitch.clamp(-1.5, 1.5);
front = vec3(
yaw.cos() * pitch.cos(),
pitch.sin(),
yaw.sin() * pitch.cos(),
)
.normalize();
right = front.cross(world_up).normalize();
up = right.cross(front).normalize();
}
clear_background(BLACK);
let camera = Camera3D {
position,
up,
target: position + front,
projection: Projection::Orthographics,
fovy: ortho_scale * 2.0,
z_far: 100000.0,
z_near: -100000.0,
..Default::default()
};
set_camera(&camera);
draw_cube_wires(vec3(90., 9., 17.), vec3(2., 2., 2.), GREEN);
draw_cube_wires(vec3(0., 1., 6.), vec3(2., 2., 2.), BLUE);
draw_cube_wires(vec3(16., 13., 8.), vec3(2., 2., 2.), RED);
let drawn = {
let mut gl = unsafe { get_internal_gl() };
gl.flush();
gl.quad_context.begin_default_pass(miniquad::PassAction::Nothing);
let view_proj: glam::Mat4 = camera.matrix();
let drawn = stage.draw_visible(&mut *gl.quad_context, &view_proj);
gl.quad_context.end_render_pass();
drawn
};
// GUI buttons for color mode
set_default_camera();
let button_y = 35.0;
let button_h = 25.0;
let button_w = 130.0;
let button_spacing = 5.0;
let mut new_color_mode = color_mode;
for (i, mode) in COLOR_MODES.iter().enumerate() {
let bx = 10.0 + i as f32 * (button_w + button_spacing);
let is_active = *mode == color_mode;
let bg_color = if is_active {
Color::new(0.3, 0.6, 1.0, 0.9)
} else {
Color::new(0.2, 0.2, 0.2, 0.8)
};
draw_rectangle(bx, button_y, button_w, button_h, bg_color);
draw_rectangle_lines(bx, button_y, button_w, button_h, 1.0, WHITE);
let text_x = bx + 8.0;
let text_y = button_y + 17.0;
draw_text(mode.label(), text_x, text_y, 18.0, WHITE);
// Check click
if is_mouse_button_pressed(MouseButton::Left) {
let (mx, my) = macroquad::input::mouse_position();
if mx >= bx && mx <= bx + button_w && my >= button_y && my <= button_y + button_h {
new_color_mode = *mode;
}
}
}
if new_color_mode != color_mode {
color_mode = new_color_mode;
let gl = unsafe { get_internal_gl() };
stage.rebuild_colors(&mut *gl.quad_context, color_mode);
}
draw_text(
&format!(
"{}/{} points | {} chunks | FPS: {:.0} | zoom: {:.1}",
drawn, stage.total_points, stage.chunks.len(),
1.0 / get_frame_time(), ortho_scale
),
10.0,
20.0,
20.0,
WHITE,
);
next_frame().await
}
}
This is fairly straightforward.
- Lines 11-35 set up the different point coloring methods.
- Lines 56 to 76 set up the view vectors.
- The loop starts on line 78. This gets executed for every frame. Some games engines abstract this way, but macroquad uses an explicit loop, and everything that is dynamic has to go inside it.
- Lines 79 to 128 deal with mouse and keyboard navigation. The view can be shifted with WASD for us gamers and the arrow keys for others. You can look around by either holding the right mouse button down or by grabbing the mouse with Tab, and zoom with the mouse wheel.
- Line 130 sets the background color. You could add two buttons to be able to switch between black and white.
- Lines 132 to 142 define the 3D camera. Most importantly, it is set to orthographic mode. Perspective mode is also possible.
- Lines 144 to 146 draw three wireframe cubes. This is example that shows how to draw vector geometry in the 3D camera space.
- Lines 148 to 157 then draw the point cloud.
- Line 160 switches the camera back to 2D mode for drawing GUI elements.
- Lines 168 to 197 draw the buttons and add the button logic. Clode has chosen to draw each button as rectangle, but macroquad has its own GUI functionality. You can also use the popular egui crate with macroquad.
- Finally, lines 199 to 209 draw the info text at the top of the screen.
Here’s the miniquad part:
mod raw_miniquad {
use std::collections::HashMap;
use las::{Point, Reader};
use miniquad::*;
use crate::ColorMode;
const CHUNK_SIZE: f32 = 50.0;
/// Point cloud backed by las::Point for full attribute access.
pub struct VizPointcloud {
pub points: Vec<Point>,
pub min: [f64; 3],
pub max: [f64; 3],
}
impl VizPointcloud {
pub fn load(filename: &str) -> VizPointcloud {
let mut reader = Reader::from_path(filename).unwrap();
let n = reader.header().number_of_points() as usize;
let mut points = Vec::with_capacity(n);
reader.read_all_points_into(&mut points).unwrap();
let mut min = [f64::MAX; 3];
let mut max = [f64::MIN; 3];
for point in &points {
min[0] = min[0].min(point.x);
min[1] = min[1].min(point.y);
min[2] = min[2].min(point.z);
max[0] = max[0].max(point.x);
max[1] = max[1].max(point.y);
max[2] = max[2].max(point.z);
}
println!("{} points loaded from {}", points.len(), filename);
VizPointcloud { points, min, max }
}
}
#[repr(C)]
#[derive(Clone, Copy)]
pub struct Vertex {
pub pos: [f32; 3],
pub color: [f32; 3],
}
pub struct Chunk {
bindings: Bindings,
num_points: i32,
aabb_min: [f32; 3],
aabb_max: [f32; 3],
point_indices: Vec<usize>, // indices into VizPointcloud::points
}
pub struct Stage {
pipeline: Pipeline,
pub chunks: Vec<Chunk>,
pub total_points: i32,
pub cloud: VizPointcloud,
positions: Vec<[f32; 3]>, // cached positions relative to min
}
fn color_for_point(point: &Point, pos_y: f32, height_range: f32, mode: ColorMode) -> [f32; 3] {
match mode {
ColorMode::Height => {
let h = if height_range > 0.0 { (pos_y / height_range).clamp(0.0, 1.0) } else { 0.5 };
let r = (2.0 * h - 0.5).clamp(0.0, 1.0);
let g = (1.0 - 2.0 * (h - 0.5).abs()).clamp(0.0, 1.0);
let b = (1.0 - 2.0 * h).clamp(0.0, 1.0);
[r, g, b]
}
ColorMode::Intensity => {
// Normalize intensity (u16 0..65535) to 0..1
let i = (point.intensity as f32 / 65535.0).clamp(0.0, 1.0);
[i, i, i]
}
ColorMode::Classification => {
classification_color(point.classification.into())
}
ColorMode::Rgb => {
if let Some(color) = &point.color {
// las colors are u16 (0..65535)
let r = color.red as f32 / 65535.0;
let g = color.green as f32 / 65535.0;
let b = color.blue as f32 / 65535.0;
[r, g, b]
} else {
[0.5, 0.5, 0.5]
}
}
}
}
fn classification_color(class: u8) -> [f32; 3] {
match class {
0 => [0.5, 0.5, 0.5], // Created/Never classified - grey
1 => [0.6, 0.6, 0.6], // Unclassified - light grey
2 => [0.6, 0.4, 0.2], // Ground - brown
3 => [0.0, 0.8, 0.0], // Low Vegetation - green
4 => [0.0, 0.6, 0.0], // Medium Vegetation - darker green
5 => [0.0, 0.4, 0.0], // High Vegetation - dark green
6 => [1.0, 0.0, 0.0], // Building - red
7 => [1.0, 0.5, 0.0], // Low Point (noise) - orange
8 => [0.8, 0.8, 0.0], // Reserved / Model Key-point
9 => [0.0, 0.0, 1.0], // Water - blue
10 => [0.8, 0.8, 0.8], // Rail
11 => [0.3, 0.3, 0.3], // Road Surface
12 => [0.9, 0.9, 0.0], // Reserved / Overlap
13 => [0.7, 0.7, 0.0], // Wire - Guard
14 => [0.9, 0.9, 0.0], // Wire - Conductor
15 => [0.4, 0.0, 0.6], // Transmission Tower - purple
16 => [0.6, 0.0, 0.8], // Wire - Connector
17 => [0.2, 0.2, 0.6], // Bridge Deck
18 => [1.0, 0.0, 0.5], // High Noise
_ => {
// Pseudo-random color for other classes
let h = (class as f32 * 0.618033988) % 1.0;
hsv_to_rgb(h, 0.8, 0.9)
}
}
}
fn hsv_to_rgb(h: f32, s: f32, v: f32) -> [f32; 3] {
let i = (h * 6.0).floor();
let f = h * 6.0 - i;
let p = v * (1.0 - s);
let q = v * (1.0 - f * s);
let t = v * (1.0 - (1.0 - f) * s);
match (i as i32) % 6 {
0 => [v, t, p],
1 => [q, v, p],
2 => [p, v, t],
3 => [p, q, v],
4 => [t, p, v],
_ => [v, p, q],
}
}
fn extract_frustum_planes(vp: &glam::Mat4) -> [[f32; 4]; 6] {
let c = vp.to_cols_array_2d();
let mut planes = [[0.0f32; 4]; 6];
for i in 0..4 {
planes[0][i] = c[i][3] + c[i][0];
planes[1][i] = c[i][3] - c[i][0];
planes[2][i] = c[i][3] + c[i][1];
planes[3][i] = c[i][3] - c[i][1];
planes[4][i] = c[i][3] + c[i][2];
planes[5][i] = c[i][3] - c[i][2];
}
for plane in &mut planes {
let len = (plane[0] * plane[0] + plane[1] * plane[1] + plane[2] * plane[2]).sqrt();
if len > 0.0 {
for v in plane.iter_mut() {
*v /= len;
}
}
}
planes
}
fn aabb_outside_frustum(planes: &[[f32; 4]; 6], amin: &[f32; 3], amax: &[f32; 3]) -> bool {
for plane in planes {
let px = if plane[0] >= 0.0 { amax[0] } else { amin[0] };
let py = if plane[1] >= 0.0 { amax[1] } else { amin[1] };
let pz = if plane[2] >= 0.0 { amax[2] } else { amin[2] };
if plane[0] * px + plane[1] * py + plane[2] * pz + plane[3] < 0.0 {
return true;
}
}
false
}
impl Stage {
pub fn new(ctx: &mut dyn RenderingBackend, filename: &str, color_mode: ColorMode) -> Stage {
let cloud = VizPointcloud::load(filename);
let height_range = (cloud.max[2] - cloud.min[2]) as f32;
let positions: Vec<[f32; 3]> = cloud
.points
.iter()
.map(|p| [
(p.x - cloud.min[0]) as f32,
(p.z - cloud.min[2]) as f32, // z -> y (up)
(p.y - cloud.min[1]) as f32,
])
.collect();
let vertices: Vec<Vertex> = cloud
.points
.iter()
.enumerate()
.map(|(i, p)| Vertex {
pos: positions[i],
color: color_for_point(p, positions[i][1], height_range, color_mode),
})
.collect();
let mut chunk_map: HashMap<(i32, i32), Vec<usize>> = HashMap::new();
for (i, pos) in positions.iter().enumerate() {
let cx = (pos[0] / CHUNK_SIZE).floor() as i32;
let cz = (pos[2] / CHUNK_SIZE).floor() as i32;
chunk_map.entry((cx, cz)).or_default().push(i);
}
let shader = ctx
.new_shader(
miniquad::ShaderSource::Glsl {
vertex: shader::VERTEX,
fragment: shader::FRAGMENT,
},
shader::meta(),
)
.unwrap();
let pipeline = ctx.new_pipeline(
&[BufferLayout::default()],
&[
VertexAttribute::new("pos", VertexFormat::Float3),
VertexAttribute::new("color", VertexFormat::Float3),
],
shader,
PipelineParams {
primitive_type: PrimitiveType::Points,
depth_test: Comparison::LessOrEqual,
depth_write: true,
..Default::default()
},
);
let total_points = vertices.len() as i32;
let chunks: Vec<Chunk> = chunk_map
.into_iter()
.map(|(_key, point_indices)| {
let chunk_verts: Vec<Vertex> =
point_indices.iter().map(|&i| vertices[i]).collect();
let mut aabb_min = [f32::MAX; 3];
let mut aabb_max = [f32::MIN; 3];
for v in &chunk_verts {
for j in 0..3 {
aabb_min[j] = aabb_min[j].min(v.pos[j]);
aabb_max[j] = aabb_max[j].max(v.pos[j]);
}
}
let n = chunk_verts.len() as i32;
let vertex_buffer = ctx.new_buffer(
BufferType::VertexBuffer,
BufferUsage::Dynamic,
BufferSource::slice(&chunk_verts),
);
let indices: Vec<u32> = (0..n as u32).collect();
let index_buffer = ctx.new_buffer(
BufferType::IndexBuffer,
BufferUsage::Immutable,
BufferSource::slice(&indices),
);
Chunk {
bindings: Bindings {
vertex_buffers: vec![vertex_buffer],
index_buffer,
images: vec![],
},
num_points: n,
aabb_min,
aabb_max,
point_indices,
}
})
.collect();
println!("{} points in {} chunks ({}m cells), height range: {:.1}m",
total_points, chunks.len(), CHUNK_SIZE, height_range);
Stage {
pipeline,
chunks,
total_points,
cloud,
positions,
}
}
pub fn rebuild_colors(&mut self, ctx: &mut dyn RenderingBackend, color_mode: ColorMode) {
let height_range = (self.cloud.max[2] - self.cloud.min[2]) as f32;
for chunk in &mut self.chunks {
let chunk_verts: Vec<Vertex> = chunk
.point_indices
.iter()
.map(|&i| {
let p = &self.cloud.points[i];
Vertex {
pos: self.positions[i],
color: color_for_point(p, self.positions[i][1], height_range, color_mode),
}
})
.collect();
ctx.buffer_update(
chunk.bindings.vertex_buffers[0],
BufferSource::slice(&chunk_verts),
);
}
}
pub fn draw_visible(&self, ctx: &mut dyn RenderingBackend, view_proj: &glam::Mat4) -> i32 {
let planes = extract_frustum_planes(view_proj);
let mut drawn = 0;
ctx.apply_pipeline(&self.pipeline);
for chunk in &self.chunks {
if aabb_outside_frustum(&planes, &chunk.aabb_min, &chunk.aabb_max) {
continue;
}
ctx.apply_bindings(&chunk.bindings);
ctx.apply_uniforms(miniquad::UniformsSource::table(
&shader::Uniforms {
mvp: *view_proj,
},
));
ctx.draw(0, chunk.num_points, 1);
drawn += chunk.num_points;
}
drawn
}
}
pub mod shader {
use miniquad::*;
pub const VERTEX: &str = r#"#version 100
attribute vec3 pos;
attribute vec3 color;
uniform mat4 mvp;
varying lowp vec3 v_color;
void main() {
gl_Position = mvp * vec4(pos, 1.0);
gl_PointSize = 2.0;
v_color = color;
}"#;
pub const FRAGMENT: &str = r#"#version 100
varying lowp vec3 v_color;
void main() {
gl_FragColor = vec4(v_color, 1.0);
}"#;
pub fn meta() -> ShaderMeta {
ShaderMeta {
images: vec![],
uniforms: UniformBlockLayout {
uniforms: vec![
UniformDesc::new("mvp", UniformType::Mat4),
],
},
}
}
#[repr(C)]
pub struct Uniforms {
pub mvp: glam::Mat4,
}
}
}
This is once again quite easy to understand:
- Lines 12 to 40 define a point cloud struct and the function for loading a point cloud, which uses the las crate.
- Lines 42 to 139 define the necessary structs and the functions for coloring the points. The intensity coloring assumes intensities from 0 to 65535 – an improvement would be to use the actual intensity range, as is done with the height range.
- Lines 141 to 173 deal with frustum culling to reduce the number of points to be drawn.
- Lines 175 to 332 define the Stage, where the actual rendering happens. This includes computing local coordinates by subtracting the cloud minimum, adding the colors, defining the render pipeline, and cutting the points into chunks.
- Finally, from line 334 on, the shader is defined. A single shader is sufficient als each point carries its own color value. Things like height gradients could also be inside a shader, and this would make sense for dynamic shaders that change appearance in every frame, but it’s not necessary here.
If you don’t need the frustum culling, you could shorten the code quite a bit.
And finally, the cargo.toml file:
[package]
name = "viewer"
version = "0.1.0"
edition = "2024"
[dependencies]
macroquad = "0.4"
las = { version = "0.9.10", features = ["laz-parallel"] }
console = "0.16"
miniquad = "0.4"
glam = { version="0.27" }
It is really light on dependences. console could easily be removed, it’s only there because I use it for coloring outputs in other programs, usually combined with indicatif for nice progress bars.
Conclusions
I’m really happy with the result. Macroquad is very bare-bones, but it has exactly what I need: basic functions for drawing 3D items, some GUI functionality, and a simple programming model. I’m also quite surprised at how well Claude Code managed to implement my wishes after I got stuck on the examples.The downside is that it becomes more difficult to understand what is going and why things are not working. I initially only got a black screen, and it took Claude three tries to fix that.


{kind=link}
{kind=link}
{kind=link}
{kind=link}