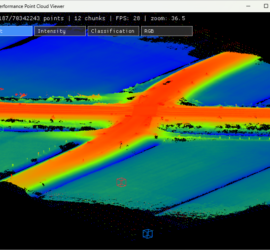
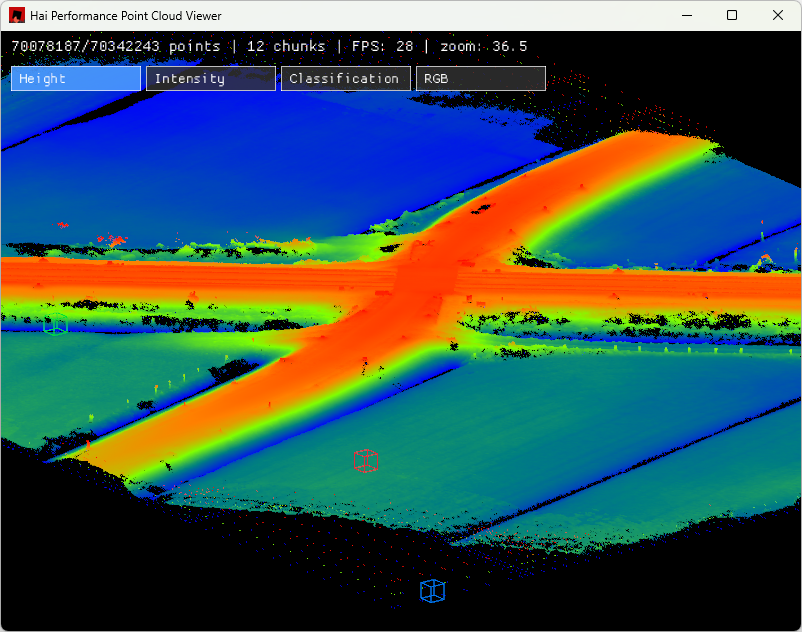
I’ve long wanted to build my own point cloud viewer. While CloudCompare is my daily driver, I would also like something that I can extend and run algorithms in. I’ve previously taken a look at Unity, […]
Point Clouds
18 posts
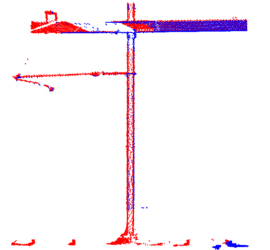
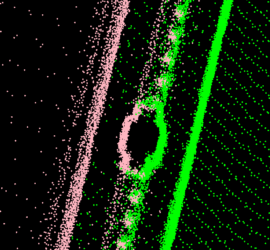
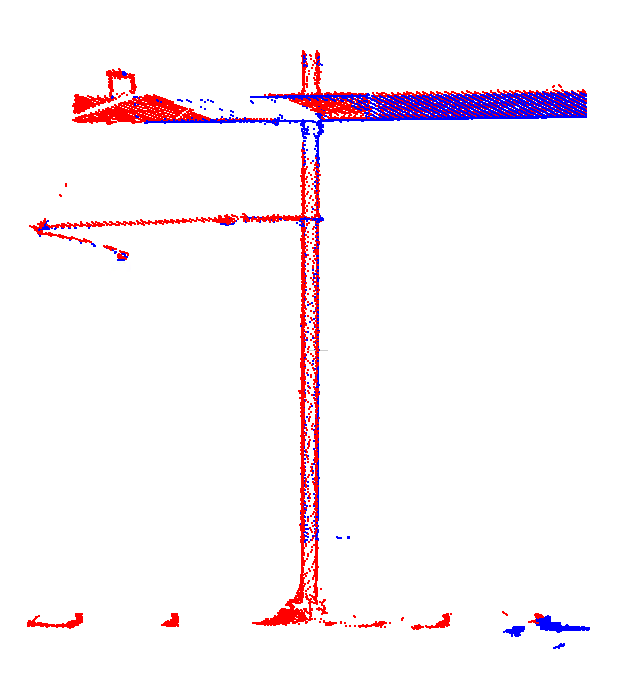
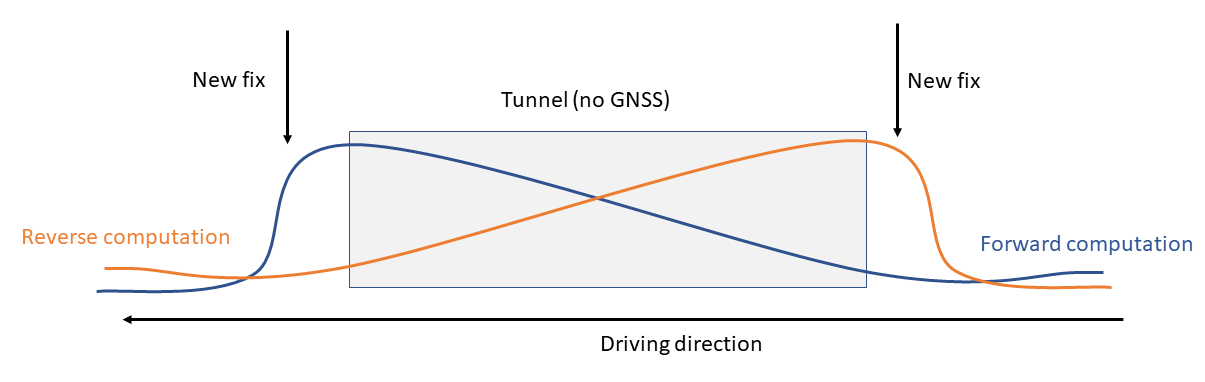
I’ve previously written about the challenges of adjusting Mobile Mapping data, such as finding suitable geometry and proper weighting of overlapping drivelines. Another issue arises where drivelines branch and rejoin. Below drawing shows the top view […]

LAZ is my preferred point cloud format, as it is a lossless compressed format that is considerably smaller than uncompressed LAS. One thing that has always bugged me is that reading LAZ is quite slow, at […]

Unreal Engine is a very powerful game engine, with Unity being the other popular choice. I’ve worked with Unity a little bit and I like how tightly it integrates with C#, but I’ve decided to take […]
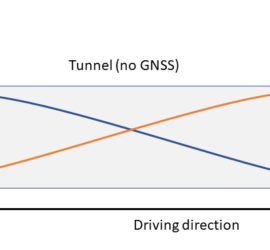
Vehicle-based Mobile Mapping is the acquisition technology of choice for fast and accurate mapping of larger areas. But how accurate is Mobile Mapping actually, and how can accuracy be improved? GNSS/INS positioning Mobile Mapping systems use […]
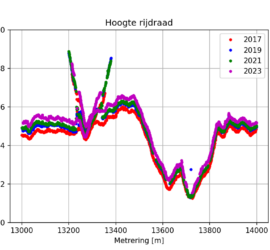
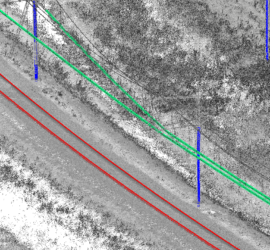
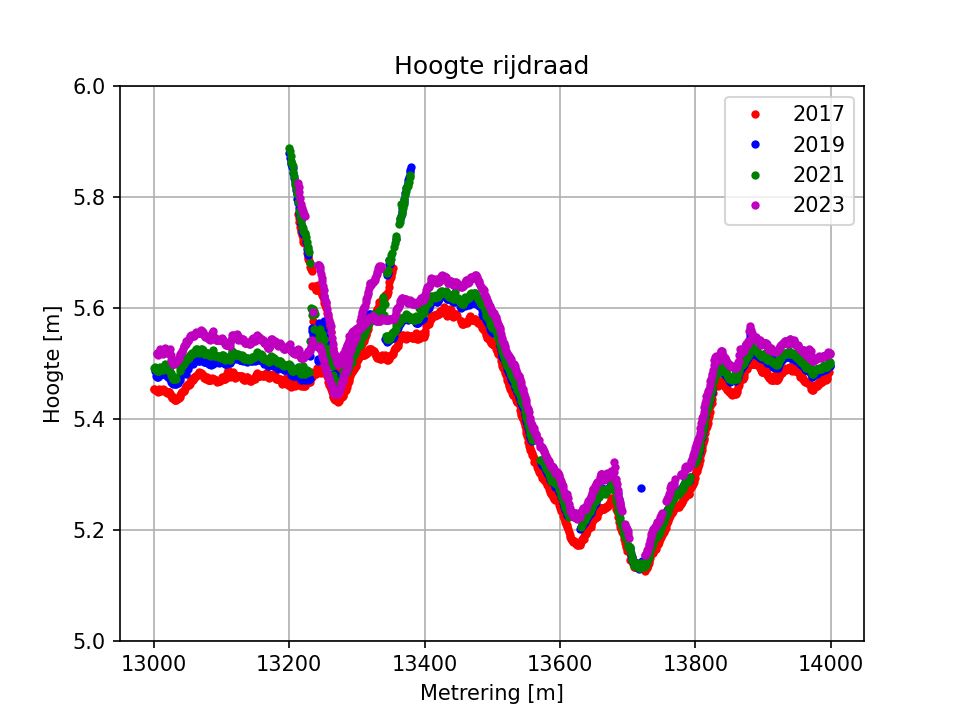
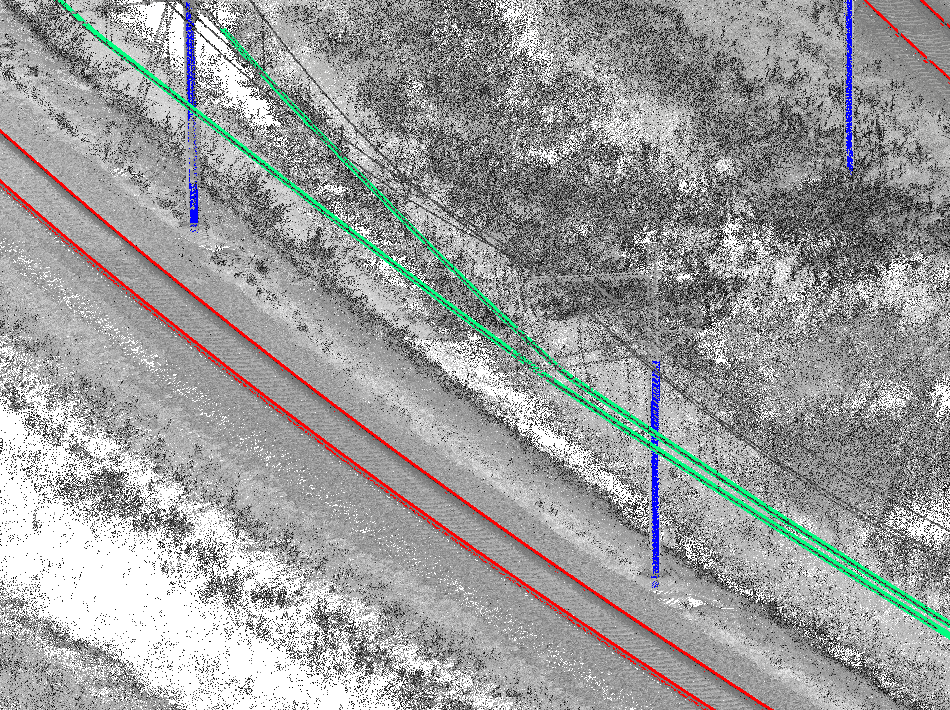
I recently got the request to determine contact wire heights from multiple years of point clouds with the goal of doing a trend analysis. Point clouds acquired in four years were available, all of them acquired […]
Modern Mobile Mapping systems make it very easy to quickly map large areas. Current laser scanners with pulse rates of 1 MHz and above make it possible to achieve sufficient point density even at highway driving […]
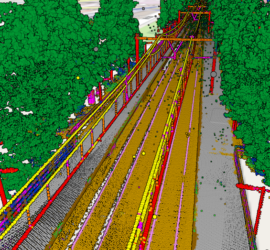
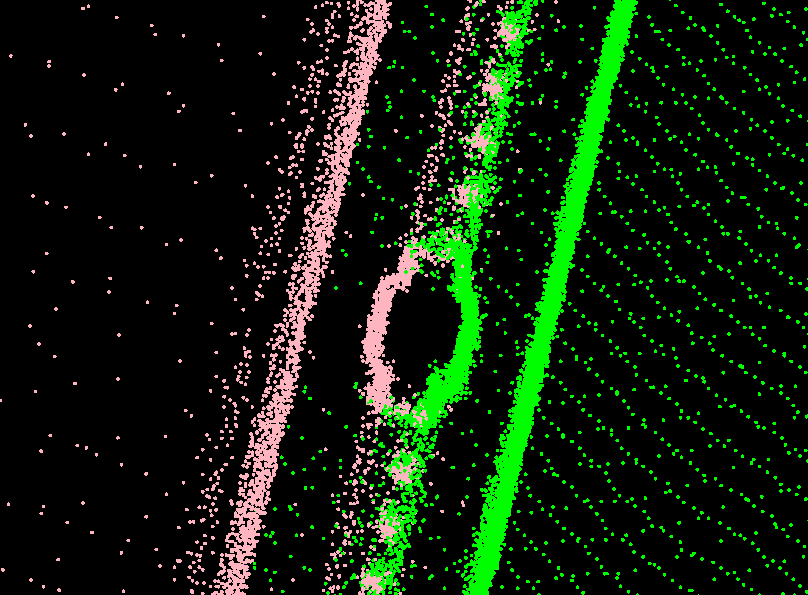
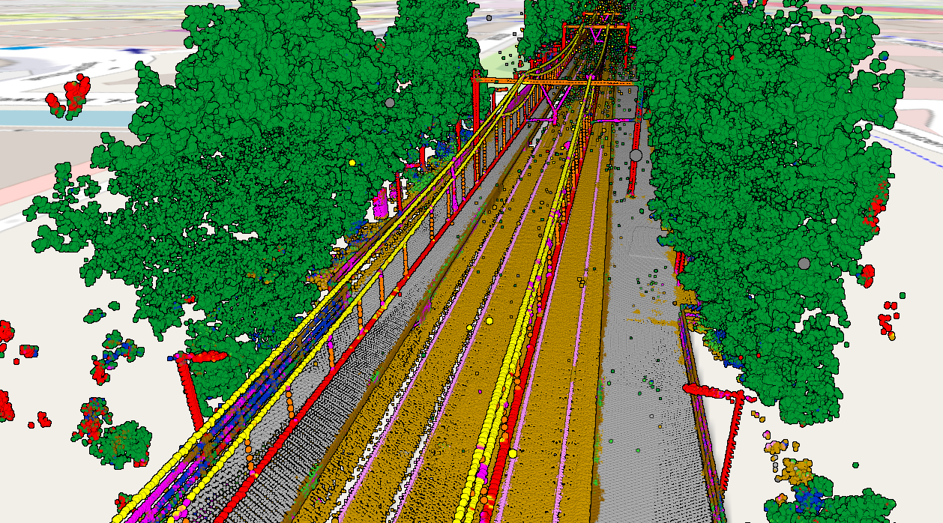
Point clouds acquired through laser scanning with mobile mapping systems mounted on rail vehicles have become the de-facto standard for efficient large-scale mapping of rail infrastructure. Unfortunately, point clouds are large and unstructured heaps of data […]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Okay, let’s be honest: Despite what the manufacturers of laser scanning equipment are trying to tell us, nobody really wants point clouds. They are huge blobs of unstructured and often noisy data with a low semantic […]